دانلود ترجمه مقاله طراحی بهینه کنترلکنندههای فازی برای سیستمهای غیرخطی
| عنوان فارسی |
طراحی بهینه کنترلکنندههای فازی برای سیستمهای غیرخطی با استفاده از بهینه سازی ازدحام ذرات چند هدفه |
| عنوان انگلیسی |
Optimum design of fuzzy controllers for nonlinear systems using multi-objective particle swarm optimization |
| کلمات کلیدی : |
بهینه سازی ازدحام ذرات؛ کنترلر فازی؛ سیستم های غیرخطی؛ نمای پارتو؛ سلطه و برتری لورنز؛ راه حل عادلانه |
| درسهای مرتبط | مهندسی برق کنترل |
| تعداد صفحات مقاله انگلیسی : 15 | نشریه : SAGE |
| سال انتشار : 2014 | تعداد رفرنس مقاله : 67 |
| فرمت مقاله انگلیسی : PDF | نوع مقاله : ISI |
|
پاورپوینت :
دانلود پاورپوینت مقاله کنترلر فازی برای سامانه غیرخطی |
وضعیت ترجمه مقاله : انجام شده و با خرید بسته می توانید فایل ترجمه را دانلود کنید |

1. مقدمه 2. برتری پارِتو و لورنز 3. الگوریتم CDPSO 4. الگوریتم CDPSO دورهای چند هدفه 5. کنترل فازی 6. طراحی پارِتو SIRMهای متصل به کنترل کننده فازی به صورت پویا 7. نتیجه گیری

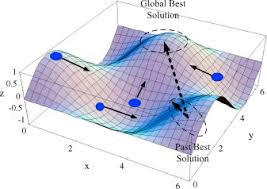
چکیده – در این مقاله، یک الگوریتم بهینه سازی ازدحام ذرات چند هدفه برای به دست آوردن مرزهای پارِتو (Pareto) توابع هدف تناسب پذیر و متضادِ مختلف، برای طراحی کنترل کننده فازی، استفاده شده است. همچنین، روش تسلط لورنز برای نشان دادن راه حلهای منصفانه استفاده شده است. معیارهای غیرخطی در واقع سیستمهای پاندول معکوس و توپ-میله می باشند. توابع هدف برای سیستم پاندول معکوس خطای زاویه نرمالِ پاندول (آونگ) و خطای فاصله نرمال گردونه است؛ و برای سیستم توپ-میله توابع هدف در واقع خطای فاصله توپ و خطای زاویه میله می باشند ، که باید به طور همزمان به حداقل برسند. با مقایسه نتایج به دست آمده با موارد موجود در آثار علمی یک برتری در نتایج حاصل از این کار مشاهده می شود. مقدمه: توسعه کنترل کننده های فازی برای مسائل مختلف مهندسی یک فعالیت تحقیقاتی بزرگ در سال های اخیر بوده است (به عنوان مثال، مطالعات انجام شده توسط Harb 2004؛ چن، 2011؛ بویی و همکاران، 2012؛ لی و همکاران، 2012؛ و یه و همکاران، 2012). در این روش، پارامترهای اکتشافی کنترلر فازی باید از طریق یک رویکرد مناسب تعیین شود. یک راه بسیار موثر برای انتخاب این عوامل استفاده از الگوریتم های تکاملی، مانند، الگوریتم ژنتیک (GA) و بهینه سازی ازدحام ذرات (PSO) است. بلاربی و همکاران (2005) الگوریتم ژنتیک را برای طراحی بهینه کنترل منطق فازی Mamdani استفاده کردند. Pourzeynali و همکاران (2007) الگوریتم ژنتیک و منطق فازی را برای کنترل اکتیو سازههای ساختمان های بلند اجرا کرده اند. شایقی و همکاران یک کنترل کننده فازی چند مرحله برای راه حل های کنترل فرکانس بار ارائه دادند که تحت قانون زدایی عمل می کند. Larbes و همکاران (2009) از یک کنترل کننده منطق فازی بهینه سازی شده برای رسیدن به حداکثر ردیابی نقطه توان در سیستم های فتوولتائیک استفاده کردند. Marinaki و همکاران (2010) کنترل فازی PSO را برای کاهش ارتعاشات تیرها بهینه سازی کردند. Bingul و Karahan (2011)) یک ربات برنامه ریزی دو درجه آزادی را باکنترل کننده منطق فازی کنترل کردند، و PSO برای هماهنگی پارامترهای فازی استفاده شد. Pan و همکاران (2011) یک کنترلر انتگرالی-مشتقی فازی بهینه با استفاده از GA و دو نوع PSO تنظیم کردند.
In this paper, a multi-objective particle swarm optimization algorithm is used to obtain the Pareto frontiers of the different commensurable and conflicting objective functions for fuzzy controller design. Also, the Lorenz dominance method is used to illustrate the equitable solutions. The nonlinear benchmarks are the inverted pendulum and ball-beam systems. The objective functions for the inverted pendulum system are the normalized angle error of the pendulum and the normalized distance error of the cart; and for the ball-beam system they are the distance error of the ball and the angle error of the beam, which must be minimized simultaneously. The comparison of the obtained results with those in the literature demonstrates the superiority of the results of this work. Introduction: The development of fuzzy controllers for various engineering problems has been a major research activity in recent years (for example, the studies by Harb and Smadi, 2004; Chen, 2011; Bui et al., 2012; Li et al., 2012; and Yeh et al., 2012). In this way, the heuristic parameters of fuzzy controllers have to be determined via an appropriate approach. A very effective way to choose these factors is the use of evolutionary algorithms, such as, for example, the genetic algorithm (GA) and particle swarm optimization (PSO). Belarbi et al. (2005) applied the genetic algorithm to optimum design of Mamdani fuzzy logic controllers. Pourzeynali et al. (2007) implemented the genetic algorithm and fuzzy logic for active control of high rise building structures. Shayeghi et al. (2008) proposed a multi-stage fuzzy controller for solution of the load frequency control which operated under deregulation – the membership functions were also designed automatically by PSO. Larbes et al. (2009) used an optimized fuzzy logic controller to achieve the maximum power point tracking in a photovoltaic system. Marinaki et al. (2010) optimized the fuzzy controller by PSO for vibration suppression of beams. Bingul and Karahan (2011) controlled a two-degrees-of-freedom planer robot by fuzzy logic controller, and PSO was utilized to tune fuzzy parameters. Pan et al. (2011) tuned an optimal fuzzy proportional-integral-derivative controller using GA and two variants of PSO.
محتوی بسته دانلودی:
PDF مقاله انگلیسی ورد (WORD) ترجمه مقاله به صورت کاملا مرتب


دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.