| عنوان فارسی |
طراحی بهینه کنترلرهای فازی برای سامانه های غیرخطی از طریق بهینه سازی ازدحام ذرات چند هدفه |
| درسهای مرتبط |
مهندسی برق کنترل |
| تعداد اسلاید : 14 | فرمت : pptx |
| قابلیت چاپ و پرینت : دارد | کیفیت طراحی : طلایی |
| سال طراحی : 1404 | برای ارائه کلاسی مناسب است؟ بله |
| قابلیت ویرایش : دارد | برای دفاعیه ارشد و دکتری مناسب است؟ بله |
| دریافت ترجمه مقاله این پاورپوینت : | دانلود ترجمه مقاله کنترل کننده فازی برای سیستم غیرخطی |

قیمت دانلود :
31,200 تومان
توضیحات
در اغلب مساله های دنیای واقعی، بهینه سازی بیش از یک تابع هدف مورد نیاز است. در این گونه مسائل اهداف اغلب در تضاد با یکدیگر هستند، که بدان معنی است که هیچ راه حل منحصر به فردی برای این مساله وجود ندارد. به عبارت دیگر، برخی راه حل های بهینه برای یک مساله چند هدفه که غیر برتر نسبت به یکدیگر باشند وجود دارد، و وظیفه طراح در چنین شرایطی این است که بهترین راه حل را با توجه به نیاز انتخاب کند.
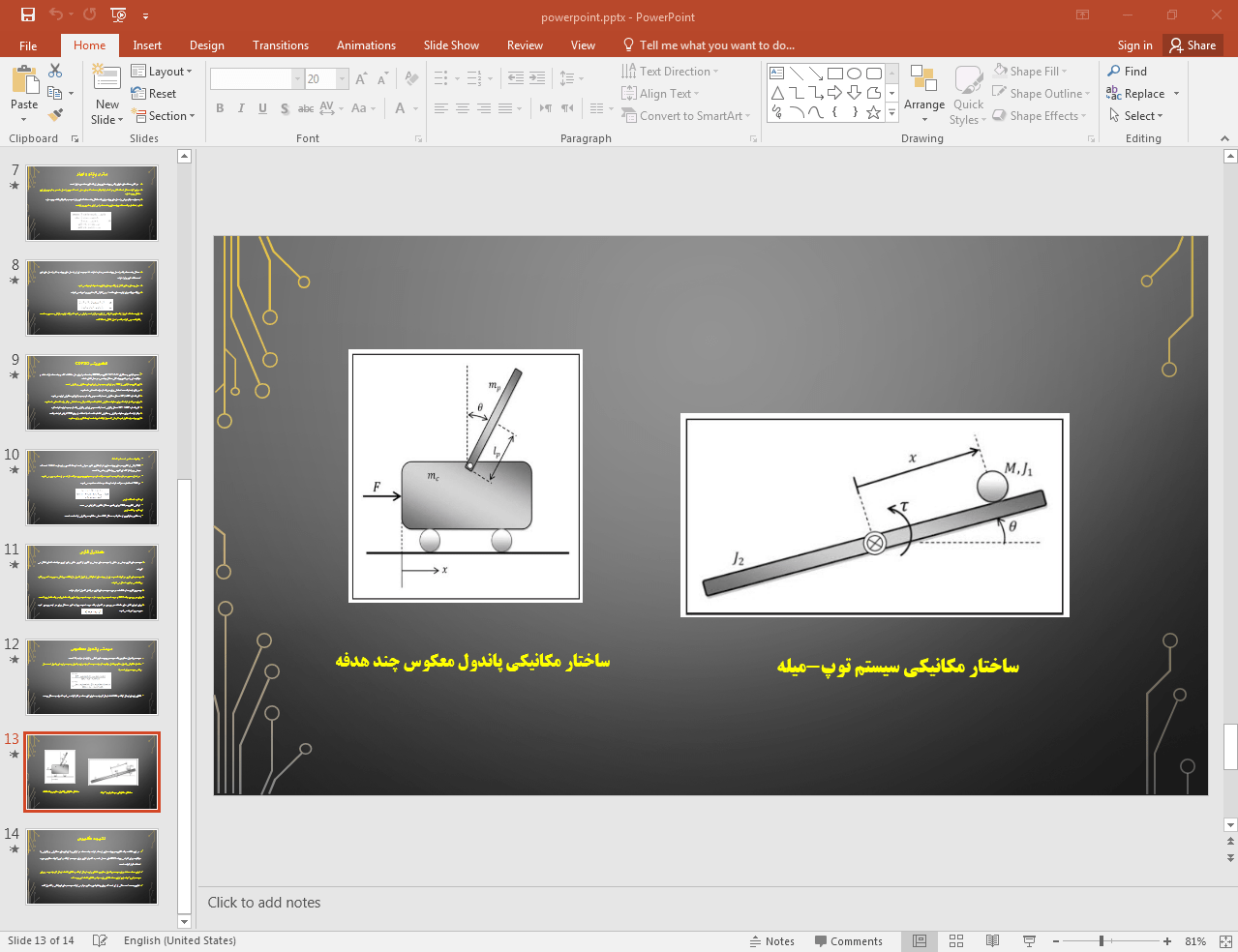
در این مطالعه، یک الگوریتم بهینه سازی ازدحام ذرات چند هدفه در ترکیب با اپراتورهای همگرایی و واگرایی با موفقیت برای طراحی بهینه SIRMهای متصل شده به کنترلر فازی برای سیستم آونگ و توپ-میله معکوس مورد استفاده قرار گرفت. توابع هدف متضاد برای سیستم پاندول معکوس، خطای زاویه نرمال آونگ و خطای فاصله نرمال گردونه بودند؛ و برای سیستم توپ-میله، این توابع هدف خطای زاویه میله و خطای فاصله توپ بودند. نتایج گزارش شده نشان دادند که روش پیشنهادی به طور موثر می تواند سیستم های غیرخطی را کنترل کند.
این پاورپوینت در 14 اسلاید آماده شده و در ادامه نیز، اسلاید شماره 13 آن قرار داده شده است:
PSO از طریق شبیه سازی سیستم های اجتماعی ساده شده، توسعه داده شد و در حل مسائل بهینه سازی پیچیده، مقاوم بوده است. این روش می تواند راه حلی با کیفیت بالا با زمان محاسبه کوتاه و ویژگی های همگرایی باثباتتر در مقایسه با سایر الگوریتم های تکاملی تولید کند. در سال های اخیر، محققان چندین گونه بهبود یافته از PSO ارائه داده اند. علاوه بر این، روش های متعددی برای توسعه الگوریتم PSO برای حل مسائل بهینه سازی چند هدفه پیشنهاد شده است. به طور خاص، محققین، برای افزایش توانایی الگوریتم برای پیدا کردن حداقل جهانی و برای فرار از حداقل محلی، PSO را با اپراتورهای جدید همگرایی و واگرایی ترکیب کردند، و این رویکرد CDPSO نامگذاری شد. در این منابع، چند تابع آزمون برای به چالش کشیدن قابلیت روش پیشنهادی برای حل مسائل تک و چند هدفه استفاده شد. نتایج نشان می دهد که این الگوریتم در معیار های پیچیده از نظر دقت و سرعت همگرایی به خوبی عمل میکند. بنابراین، در این مقاله، الگوریتم CDPSO چند هدفه دوره ای برای طراحی بهینه کنترلر فازی برای سیستم های غیر خطی استفاده شده است. علاوه بر این، برای شناسایی راه حل های عادلانه پارِتو، برتری لورنز استفاده شده است.


اولین نفری باشید که دیدگاهی را ارسال می کنید برای “دانلود پاورپوینت مقاله طراحی کنترلر فازی برای سامانه های غیرخطی” لغو پاسخ
پروپوزال آماده
مقالات ترجمه شده
پایان نامه آماده
پاورپوینت آماده
نماد اعتماد الکترونیکی

پشتیبانی
تمامی حقوق مادی و معنوی برای سایت فرداپیپر محفوظ است.
copyright 2026 - fardapaper.ir - Allrigth Reserved©
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.