دانلود پاورپوینت مقاله روش انحراف خطای برآورد موقعیت PMSM
| عنوان فارسی |
بررسی روش ایجاد انحراف در خطای برآورد موقعیت موتور PMSM با استفاده از ترکیب SMO جبرانسازی خود بخودی فاز و PLL پیش خور |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد اسلاید : 30 | فرمت : pptx |
| قابلیت چاپ و پرینت : دارد | کیفیت طراحی : طلایی |
| سال طراحی : 1404 | برای ارائه کلاسی مناسب است؟ بله |
| قابلیت ویرایش : دارد | برای دفاعیه ارشد و دکتری مناسب است؟ بله |
| دریافت ترجمه مقاله این پاورپوینت : | دانلود ترجمه مقاله خنثی کردن خطای تخمین موقعیت PMSM |

قیمت دانلود :
42,600 تومان
توضیحات
روش های مبتنی بر مشاهده گره های نیروی محرکه الکتریکی معکوس پایه مانند مشاهده گرهای شار، مشاهده گرهای وضعیت کامل/کاهش یافته، سیستم های انطباقی مرجع مدل (MRASs)، فیلترهای بسط داده شده کالمان (EKFs) و مشاهده گرهای حالت لغزشی (SMOs) به طور گسترده در سرعت های متوسط و بالا برای تخمین موقعیت روتور بکار گرفته می شوند. این روش ها برای حل مشکلات مختلف پیشنهاد می شوند و محدودیت های کاربردی متفاوتی هم دارند. مشاهده گر شار ساختاری کاملاً ساده با یک واکنش دینامیک سریع دارد. با این حال یکسوگرایی های DC سنجش ولتاژ و جریان و شرط اولیه، بخاطر کارکرد کاملاً یکپارچه بر دقت تخمین موقعیت روتور تاثیر خواهند داشت. مشاهده گرهای وضعیت کامل/کاهش یافته روش های مهم بکار رفته در تخمین موقعیت روتور هستند. این روش ها می توانند به تخمین موقعیت سریع با قابلیت اطمینان بالا برسند، اما به تغییرات پارامتر حساس هستند. سیستم های انطباقی مرجع مدل (MRASs) در صورتی می توانند به دقت بسیار بالای تخمین موقعیت برسند که مدل و پارامترها به اندازه کافی دقیق باشند. در محیط دارای نویز، فیلتر بسط داده شده کالمان (EKF) می تواند بخوبی کار کند و تخمین موقعیت بهینه بازگشتی ارائه کند. با این حال عملیات های ماتریکس پیچیده بار محاسباتی سیستم کنترل را بیشتر می کند که کاربردها در گستره سرعت بالا را محدود می کند. SMO بخاطر ساختار ساده، قدرتمندی بالا و حساسیت کم به تغییرات پارامتر، به عنوان یک گزینه جالب برای تخمین موقعیت روتور مطرح شده است. این پاورپوینت به بررسی روش ایجاد انحراف در خطای برآورد موقعیت موتور PMSM با استفاده از ترکیب SMO جبرانسازی خود بخودی فاز و PLL پیش خور پرداخته است.
این پاورپوینت در 30 اسلاید آماده شده و در ادامه نیز اسلاید شماره 2 آن قرار داده شده است:
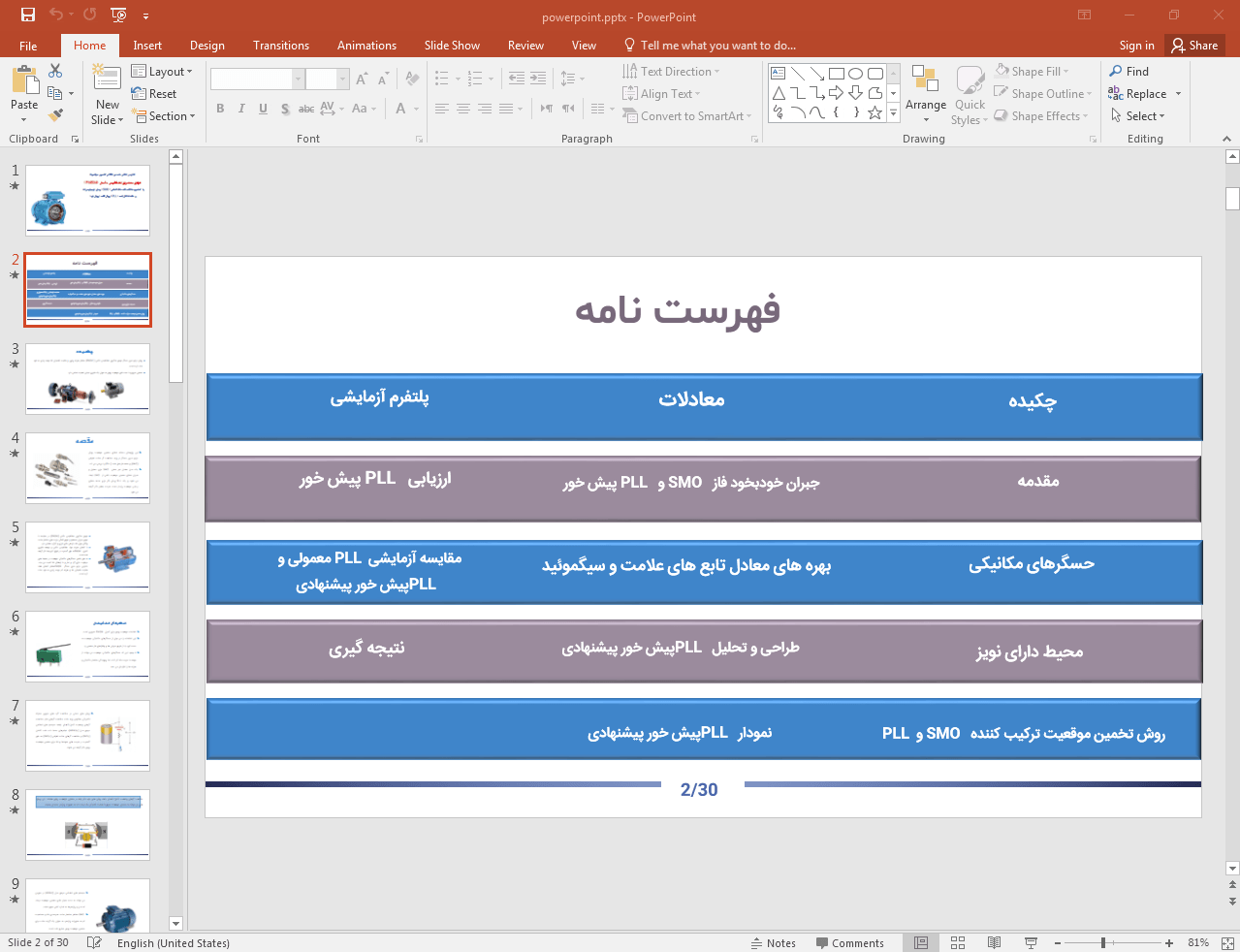
نقش اصلی این مقاله حل مسئله خطای تخمین موقعیت در درایو بدون حسگر بر پایه SMO و PLL است. یک روش تعدیل خودبخودی فاز SMO با ایجاد یک مدل معادل غیرخطی پیشنهاد می شود که می تواند خطای موقعیت روتور ناشی از تاخیر فاز SMO را جبران کند. PLL پیش خور پیشنهادی می تواند خطای تخمین حالت پایدار را تحت عملیات های شتاب گیری و کاهش شتاب خنثی کند و برای کاهش خطای موقعیت هارمونیک هم سودمند است.
در ادامه، اسلاید شماره 24 این پاورپوینت، قرار داده شده است:
این مقاله بر پایه تحلیل روش درایو بدون حسگر معمولی با SMO و PLL، یک فناوری خنثی سازی خطای تخمین موقعیت با ترکیب SMO جبران خودبخودی فاز و PLL پیش خور پیشنهاد می کند. از طریق مدل معادل پیشنهادی SMO، خطای تخمین موقعیت ناشی از تاخیر فاز SMO در زمان واقعی جبران (خنثی) می شود. در کاربردهای سرعت متغیر، PLL معمولی عملکرد تخمین موقعیت ضعیفی نشان می دهد و تحت فرآیندهای شتاب گیری و کاهش شتاب دچار خطای تخمین موقعیت حالت پایدار می شود. در مقابل افزایش پهنای باند PLL، PLL پیش خور بهره فیلتر حلقه کوچک تری در مقایسه با PLL معمولی دارد که برای خنثی کردن خطا و کاهش خطای موقعیت هارمونیک مناسب است. یک مجموعه آزمایش کارایی فناوری خنثی سازی خطای تخمین موقعیت پیشنهادی را تایید کرد. خاطرنشان می شود که روش تحلیل تاحیر فاز پیشنهادی SMO مرجعی عملی برای تحلیل مشخصه فاز مشاهده گرهای دیگر فراهم می کند.




تمامی حقوق مادی و معنوی برای سایت فرداپیپر محفوظ است.
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.