دانلود پاورپوینت مقاله کنترل بهینه سامانه MIMO روتور دوقلو با LQR و روش انتگرالی
| عنوان فارسی |
کنترل بهینه سیستم MIMO روتور دوقلو از طریق LQR با عمل انتگرالی |
| درسهای مرتبط |
ماشین های الکتریکی |
| تعداد اسلاید : 32 | فرمت : pptx |
| قابلیت چاپ و پرینت : دارد | کیفیت طراحی : طلایی |
| سال طراحی : 1405 | برای ارائه کلاسی مناسب است؟ بله |
| قابلیت ویرایش : دارد | برای دفاعیه ارشد و دکتری مناسب است؟ بله |
| دریافت ترجمه مقاله این پاورپوینت : | دانلود ترجمه مقاله کنترل بهینه MIMO روتور دوقلو |

قیمت دانلود :
116,700 تومان
توضیحات
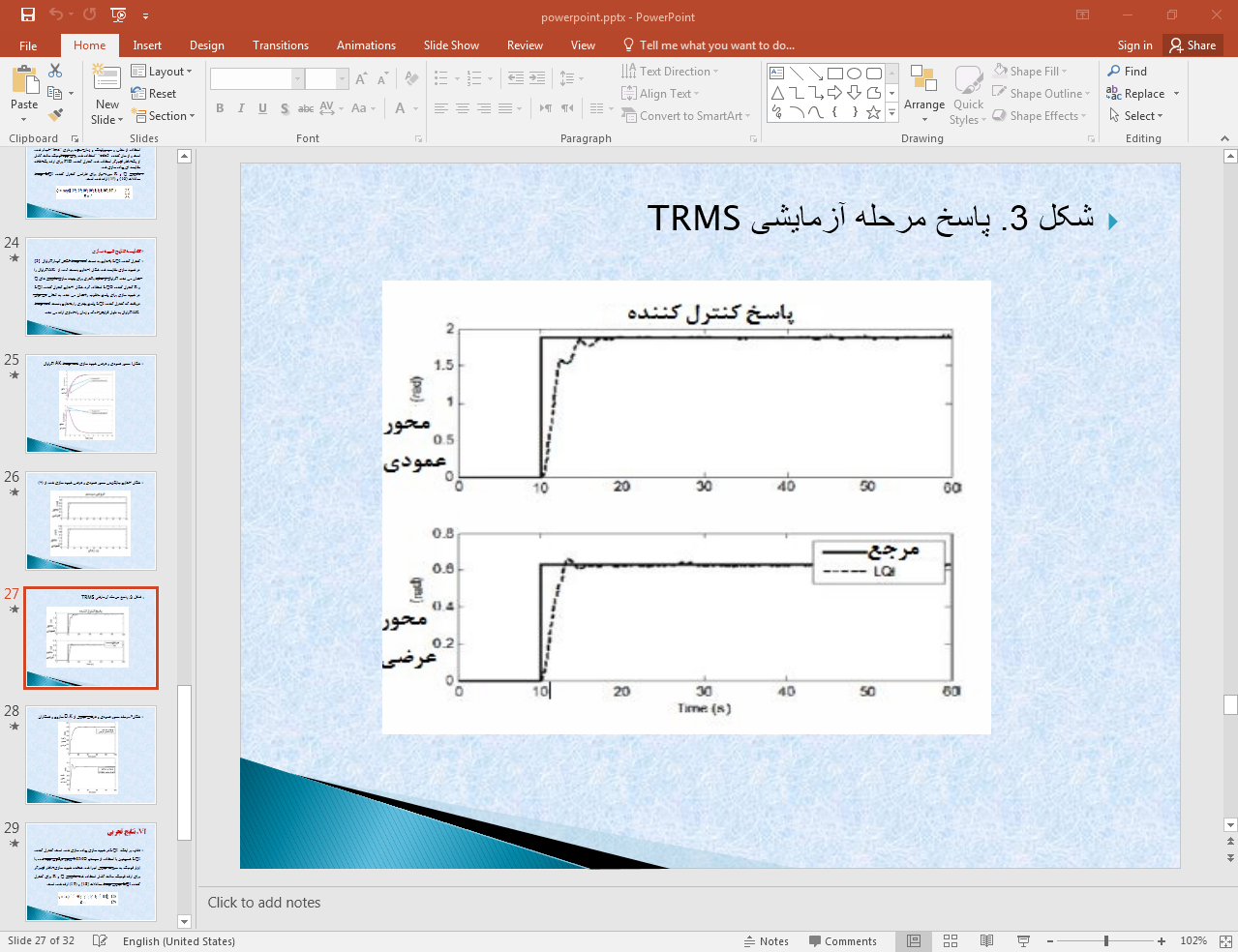
یک کنترل کننده LQI، طراحی و شبیه سازی شده و به صورت آزمایشی اجرا و در مقایسه با کنترل کننده های بهینه و قوی موجود در مقالات مقایسه شد. یافته ها نشان داد که کنترل کننده LQI ارائه شده در اینجا عملکردی برتری از راه حلهای کنترل کننده موجود دارد. در شبیه سازی نشان داده شد که کنترل کننده LQI عملکرد بهتری را نسبت به الگوریتم تغذیه باکتری LQG ارائه می دهد. به طور آزمایشی مشخص شد که کنترل کننده LQI نسبت به کنترل کننده حالت لغزشی پیاده سازی شده پاسخ بهتری را ارائه می دهد. زمینه کار آینده پیاده سازی کنترل کننده ردیابی بهینه خطی یا غیرخطی است. این امر می تواند ردیابی کامل تمام حالتهای سیستم را تضمین کرده و در عین حال ویژگیهای توانمندی فوق الذکر را حفظ کند.
این پاورپوینت در 32 اسلاید آماده شده و در ادامه نیز، اسلاید شماره 27 آن قرار داده شده است:
TRMS یک راه اندازی آزمایشگاهی است که توسط ابزارهای فیدبک برای آزمایش کنترل کننده های جدید ارائه می شود. TRMS با پویایی بسیار غیر خطی همراه بوده و شامل یک پرتو افقی است که از طریق یک محور دو بعدی به یک ستون عمودی ثابت می شود. روتور اصلی به جلوی پرتو افقی موازی زمین چسبانده شده است. روتور دم در پشت پرتو افقی عمود بر زمین چسبانده می شود. برای حرکت نقطه تعادل سیستم ، یک پرتو تعادل در تیر محوری به تیر افقی چسبانده می شود. روتور اصلی و روتور دم توسط دو موتور DC کنترل می شوند.
موتورهای DC با استفاده از کارت DAC که در رایانه رومیزی نصب شده است کنترل می شوند. کارت DAC از طریق کنترل کننده که با استفاده از متلب و سیمیولینک طراحی شده است، دستورات را ارسال می کند. کنترل بلادرنگ TRMS از متلب با استفاده از کنترل امکان پذیر است.



اولین نفری باشید که دیدگاهی را ارسال می کنید برای “دانلود پاورپوینت مقاله کنترل بهینه سامانه MIMO روتور دوقلو با LQR و روش انتگرالی” لغو پاسخ
پروپوزال آماده
مقالات ترجمه شده
پایان نامه آماده
پاورپوینت آماده
نماد اعتماد الکترونیکی

پشتیبانی
تمامی حقوق مادی و معنوی برای سایت فرداپیپر محفوظ است.
copyright 2026 - fardapaper.ir - Allrigth Reserved©
دیدگاهها
هیچ دیدگاهی برای این محصول نوشته نشده است.